北京大学第三医院运动医学科张辛教授团队在国际权威期刊International Journal of Surgery(国际外科学杂志)(IF=12.5)在线发表了题为“Feasibility and accuracy of robot-assisted tunnel placement in anatomic arthroscopic posterior cruciate ligament reconstruction”(机器人辅助关节镜下后交叉韧带解剖重建的可行性和准确性)的研究成果。
原文链接:
https://journals.lww.com/international-journal-of-surgery/citation/9900/feasibility_and_accuracy_of_robot_assisted_tunnel.1791.aspx
研究内容简介
后交叉韧带对于维持膝关节的稳定至关重要,其损伤会导致患者关节不稳、运动障碍,甚至丧失生活能力。随着全民健身的兴起,后交叉韧带损伤发病率日益增加。膝关节镜下后交叉韧带重建术是有运动需求的患者的常见治疗方式。其手术目的是精确恢复后交叉韧带解剖和生物力学功能,最终恢复到损伤前的运动水平。
后交叉韧带相对于前交叉韧带而言,解剖位置更加深在,并且胫骨止点毗邻膝关节后方重要的血管神经。该手术的重点难点在于准确地识别后交叉韧带的解剖位点并在此基础上精确地钻取骨道,稍有不慎则可能造成严重的并发症。因此,寻找一种安全可行的方法增加手术的准确性是当前的迫切需要。
近年来,手术机器人发展迅速。与传统手术相比,机器人增加了手术精确性,减少了手术时间和出血量。但目前对于后交叉韧带重建术仍未见报道。为解决这一难题,张辛教授带领团队研发了针对交叉韧带重建术的手术机器人系统。术者可以通过自行研发的交叉韧带规划软件根据膝关节的三维图像进行骨道位置和长度的规划,随后通过机械臂的自动导航实现骨道的精准定位。二者的有机结合使整个手术过程达到安全和准确的效果。
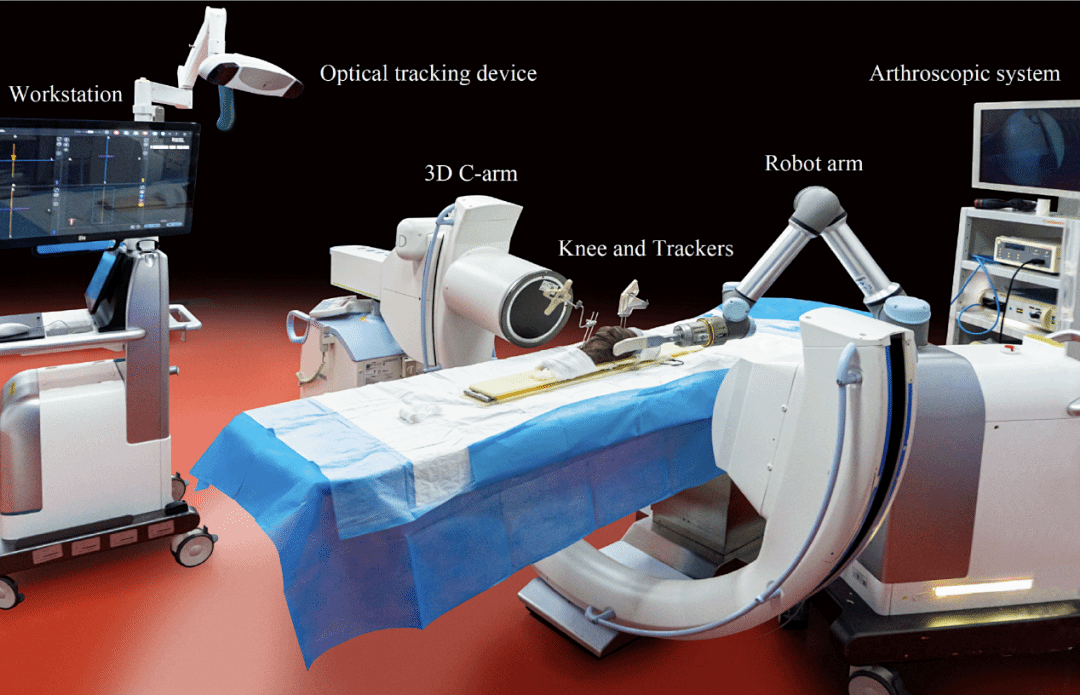
交叉韧带手术机器人系统如图所示,由手术规划工作站,光学导航装置,机械臂三部分组成。其中手术规划工作站相当于医生的“大脑”,起到骨道规划和控制手术流程的作用。机械臂相当于医生的“手”,可以在手术室安全运动,起到精确而稳定的导航作用。而光学导航模块相当于医生的“眼睛”,它的主要作用是实时追踪膝关节和器械的空间位置。
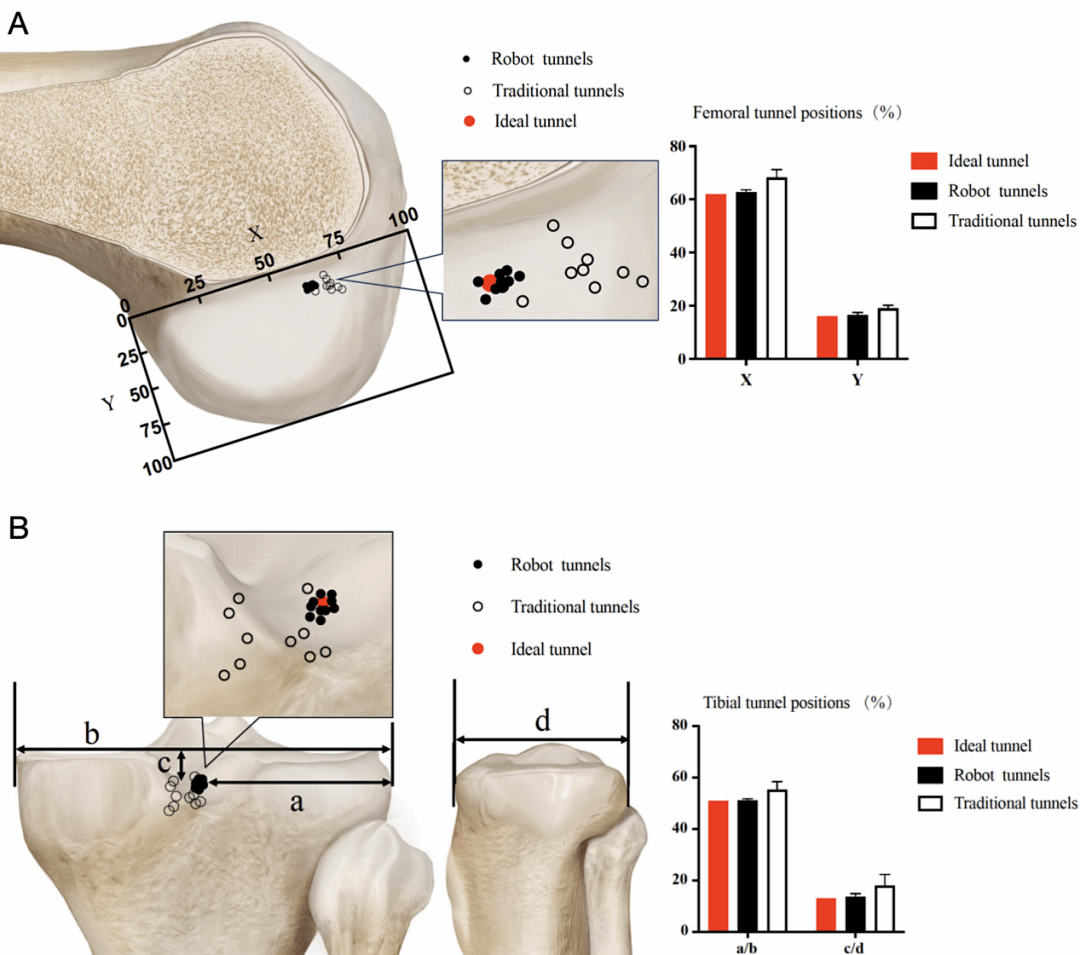
本研究将机器人手术与传统手术的后交叉韧带骨道进行比对,发现通过机器人钻取的骨道位置更加接近后交叉韧带的解剖位置,同时机器人的骨道位置更加的集中和稳定。此外,机器人可精确控制骨道的长度,从而有效避免骨道钻取过深导致的腘动脉损伤。
该研究结果基本验证了机器人辅助后交叉韧带重建术的安全性和准确性,为后续的临床应用奠定了基础,也为关节镜手术提供了新的治疗思路。
* 该研究成果得到国家自然科学基金、北京市自然科学基金等项目资助。
 科学研究
科学研究