近日,北京大学第三医院骨科李危石教授在国际骨科顶级期刊、美国骨科协会官方杂志《The Journal of bone and joint surgery. American volume》(JBJS)发表题目为“一种用于胸腰椎自主椎板切除的新型脊柱机器人系统的准确性评估:尸体研究”(Accuracy Evaluation of a Novel Spinal Robotic System for Autonomous Laminectomy in Thoracic and Lumbar Vertebrae,A Cadaveric Study)的研究成果[1]。本研究为李危石教授团队关于脊柱椎板自主识切机器人系统系列研究成果之一,通过尸体试验对机器人系统的效率、准确性及安全性进行了验证。
目前临床应用的脊柱机器人多数功能为辅助椎弓根置钉,缺乏具有自主识别并精准切除椎板的脊柱机器人系统。为填补这一临床空白,李危石教授牵头承担了国家重点研发计划,带领多学科团队率先研发出了全球首例脊柱椎板自主识切机器人系统(以下简称机器人系统)(图1)。该系统自研的术前规划软件对脊柱空间定位方式进行了优化[2],术者通过术前脊柱三维重建图像即可进行手术规划。术中机器人系统通过融合操作末端多个传感器信息,利用深度学习方法对椎板切削状态进行分类,实现对切削穿透时刻的精准感知,保证操作过程中的安全性,即实现自主“识”别功能[3-5];同时,其自动化程度也较目前的脊柱机器人更上一个台阶,实现了机器人全自动椎板切除,即实现自主“切”削功能[6]。两者有机结合形成了该“自主识切”机器人安全控制策略。

图 1 脊柱椎板自主识切机器人系统。包括机械臂,末端执行器,双目导航仪及超声骨动力系统
本文中研究团队首次提出了机器人椎板切除效果的综合评估体系。该体系涵盖了机器人自主切削效率,准确性及安全性三个方面。
1.切削效率:包括单侧椎板切削耗时及单节段全椎板切除耗时。
2.切削准确性:包括定量及定性两个方面。前者通过测量术后CT轴位上实际切面和规划切面在头尾端的偏移距离实现;后者借鉴机器人辅助椎弓根置钉领域广泛应用于评价置钉效果的Gertzbein-Robbins量表,首次提出了一个机器人椎板切除切面效果分级:A级,规划的切割线基本位于实际切割槽内,或最大距离<1mm>2mm。(图2)
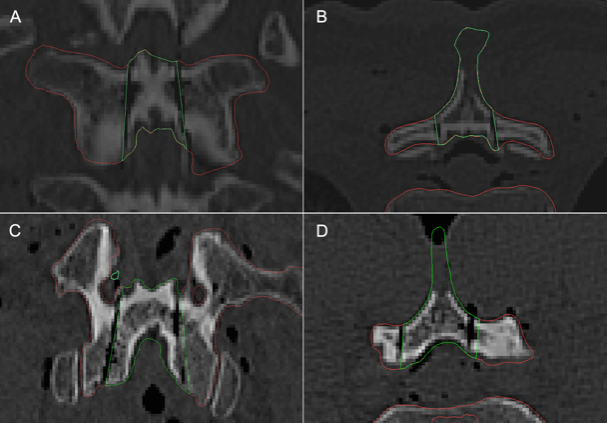
图2. 机器人椎板切除切面效果评估。根据研究团队提出的分级标准,该图上半部分的双侧切面均为A级,下半部分的右侧切面为A级,左侧切面为B级。
3.切削安全性:通过术后CT轴位影像对机器人切削操作是否出现穿透内层椎板进行分析。如未穿透视为安全。
结果表明该机器人进行单侧椎板切除的平均时间约5.5分钟,单节段全椎板切除平均时间约13.6分钟。实际切割平面和预先规划平面之间的平均偏移距离在头侧为0.67±0.30mm,尾侧为0.73±0.31mm。在总共80个切削平面中,83%被评为A级,18%被评是B级,没有C级。研究结果基本验证了该机器人系统进行胸腰椎自主椎板切除操作的准确性和安全性,为后续该机器人的临床应用奠定基础。
北医三院骨科李卓夫和王承夏为本文共同第一作者,李危石教授和胡磊教授为共同通讯作者。本研究在李危石教授牵头的国家重点研发计划“面向脊柱椎板切除手术的机器人系统”的支持下进行,该项目于今年2月顺利进行科技部项目结题验收工作。项目团队共申请15项发明专利,已授权国家发明专利3项,国际专利2项。软件著作权授权1项。

图3 国家重点研发计划“面向脊柱椎板切除手术的机器人系统”项目验收
JBJS文章链接:
https://journals.lww.com/jbjsjournal/Fulltext/9900/Accuracy_Evaluation_of_a_Novel_Spinal_Robotic.760.aspx
李危石团队相关研究:
[1] Li Z, Wang C, Song X, Liu S, Zhang Y, Jiang S, Ji X, Zhang T, Xu F, Hu L,Li W.Accuracy Evaluation of a Novel Spinal Robotic System for Autonomous Laminectomy in Thoracic and Lumbar Vertebrae: A Cadaveric Study[J].The Journal of Bone and Joint Surgery. American Volume,2023.
[2] Zhang Y, Hu N, Li Z, Ji X, Liu S, Sha Y, Song X, Zhang J, Hu L,Li W.Lumbar spine localisation method based on feature fusion[J].Caai Transactions on Intelligence Technology,2022.
[3] Li Z, Jiang S, Song X, Liu S, Wang C, Hu L,Li W. Collaborative spinal robot system for laminectomy: a preliminary study[J].Neurosurg Focus,2022, 52 (1): E11.
[4] Hu L, Zhang Y, Zhang J, Zhang T, Song X, Ji X, Liu S, Li Z,Li W. STP-Net: Signal prediction method of laminar decompression robot based on Swin Transformer[J], Int J Intell Syst(录用未见刊)
[5] Ji X, Wang Y, Zhang Y, Hu L, Li K, Duan W,Li W, Liu W. Breakthrough Prediction in Robotic Laminectomy Based on Electrical Impedance Monitoring with LSTM-FCN[C].2022 WRC Symposium on Advanced Robotics and Automation (WRC SARA),2022: 107-112.
[6] 李卓夫, 宋雄康,季旭全,刘杉杉,姜帅,王承夏,胡磊,李危石. 基于3D打印配准模板的脊柱机器人系统在椎板切除中的应用[J].生物骨科材料与临床研究,2022, 19 (02): 11-13+25.
专家简介

李危石
教授、主任医师、博士生导师
现任北京大学第三医院骨科主任、脊柱外科主任
骨与关节精准医学教育部工程研究中心主任,国家科技创新领军人才
担任中华预防医学会脊柱疾病防治专业委员会副主任委员、脊柱退变学组组长
中国康复医学会骨质疏松预防与康复专业委员会第一届委员会副主任委员
北京医学会骨科学分会副主任委员
AO Spine中国区主席
中国医师协会骨科医师分会全国委员、副总干事
中国医药教育协会骨并发症专业委员会副主任委员
中国医药教育协会骨科分会脊柱学组副主任委员
中国医疗保健国际交流促进会骨科学分会副主任委员等
发表文章100余篇,主持课题10余项,发明专利7项,主编主译专著6部
 科室新闻
科室新闻