近日,中国首例手持导航系统辅助下的全髋关节置换手术在北京大学第三医院成功完成。手持导航系统让髋关节置换手术在实现精准化的同时,变得更加便捷,也更易推广。该技术的成功开展标志着我国关节置换的数字化领域又迎来了一名新的成员。
12月15日,北京大学第三医院骨科成功完成了一台手持导航系统辅助下的全髋关节置换术,该手术由骨科关节外科主任田华教授和李杨副主任医师共同实施。据了解,这是我国首例采用手持导航系统进行的全髋关节置换手术,术后患者假体位置理想,恢复迅速,该手术的成功开展标志着我国关节置换的数字化领域又迎来了一名新的成员。
该患者为一名68岁女性,患髋关节骨性关节炎多年(图1),常年的疼痛和活动受限严重影响了患者的生活质量。在术中,手持导航系统可以显示髋臼磨挫和髋臼杯假体的安放角度,并显示髋关节的偏心距以及下肢长度的重建情况。手持导航仪上的实时反馈数据,可以将假体安放的位置和角度精确到1毫米和1度,从而最大程度地避免了人工操作的误差。在此导航系统的辅助下,患者的假体被安放到了准确的位置,下肢长度和偏心距得到了重建,并获得了非常满意的髋关节活动度和稳定性。手术仅用时60余分钟,与传统导航相比缩短了手术时间。患者术后的影像学结果显示,假体的位置、角度和肢体长度都非常理想(图2)。手术当天晚上患者即可下地活动,住院仅2天后,患者即平稳出院回家。

图1. 患者术前X光片。女性,68岁,双侧髋关节骨性关节炎。
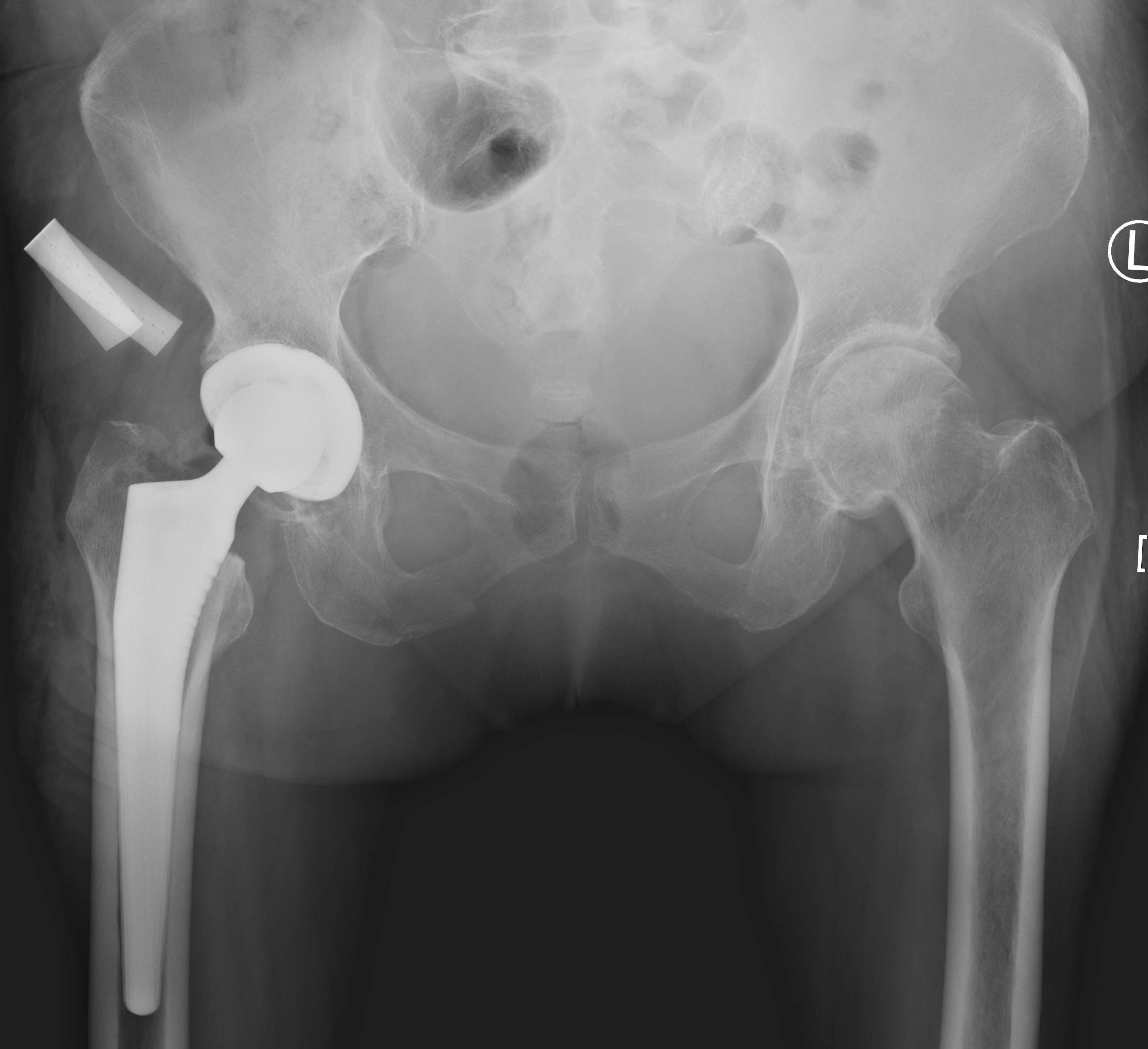
图2. 患者术后X光片。假体位置和角度理想,下肢偏心距和长度得到了重建
人工全髋关节置换术是一种对技术要求较高的手术,准确的假体安放对于手术效果至关重要,若术中假体安放位置不良,会增加术后下肢不等长、假体脱位等并发症的风险。目前,随着科技的进步,数字化、智能化技术逐渐问世,导航系统和手术机器人系统是其中的代表,被认为是解决上述问题的最佳方案。但是,无论是传统的导航系统还是手术机器人系统,都有其劣势。第一,上述系统的仪器均较庞大,购置金额昂贵,这就在一定程度上限制了它们的推广和使用。第二,手术机器人技术大多需要患者在术前完善CT检查,在计算机中进行术前规划后才可进行手术,这就无形中增加了患者的术前检查成本,并延长了患者等候手术的时间。而手持导航系统的出现,恰好弥补了上述两点不足。手持导航系统的工具非常简单(图3),便于携带且成本较低,它不需要患者进行术前CT或其他任何额外的检查,解剖标志注册、骨骼定位、假体示踪均在术中完成(图4-5)。它在维持了精准化的同时,还兼具了便捷性,降低了使用成本并易于推广。可以相信,这一技术的加入,是我国关节外科数字化领域的重要补充,随着未来的不断推广和发展,将能让更多的患者因此而受益。

图3. 手持导航系统的工具准备
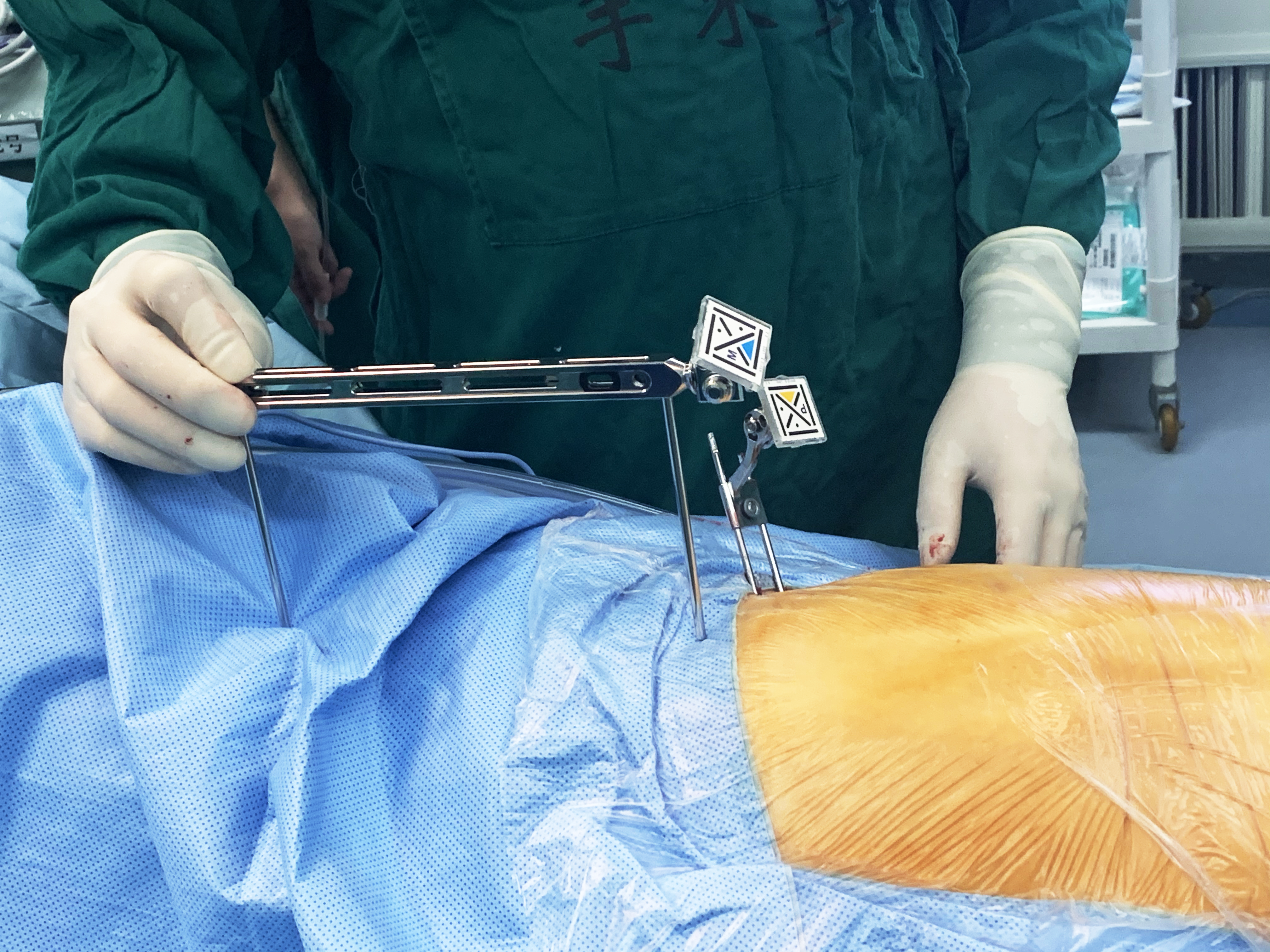
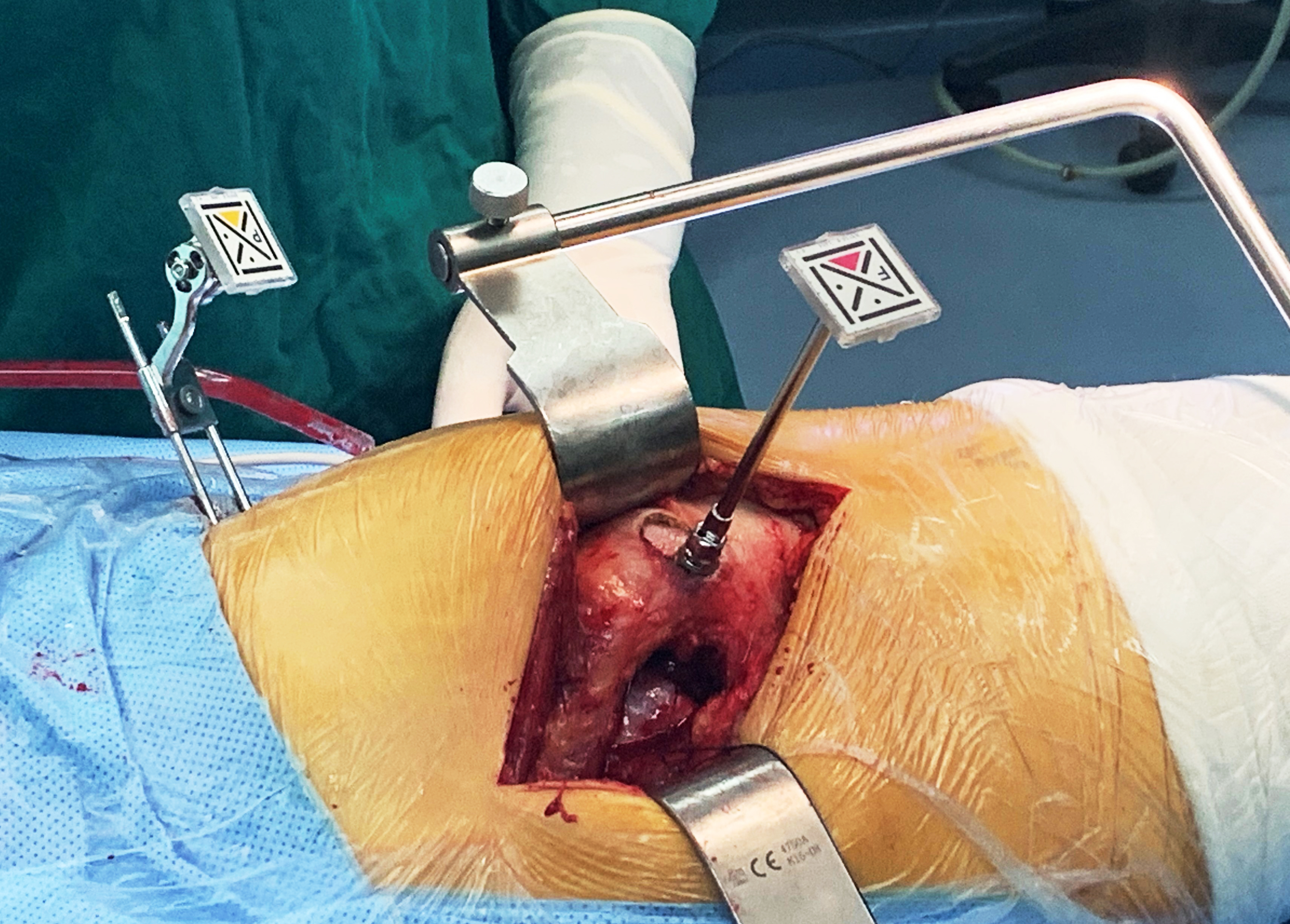
图4. 手持导航系统的术中注册


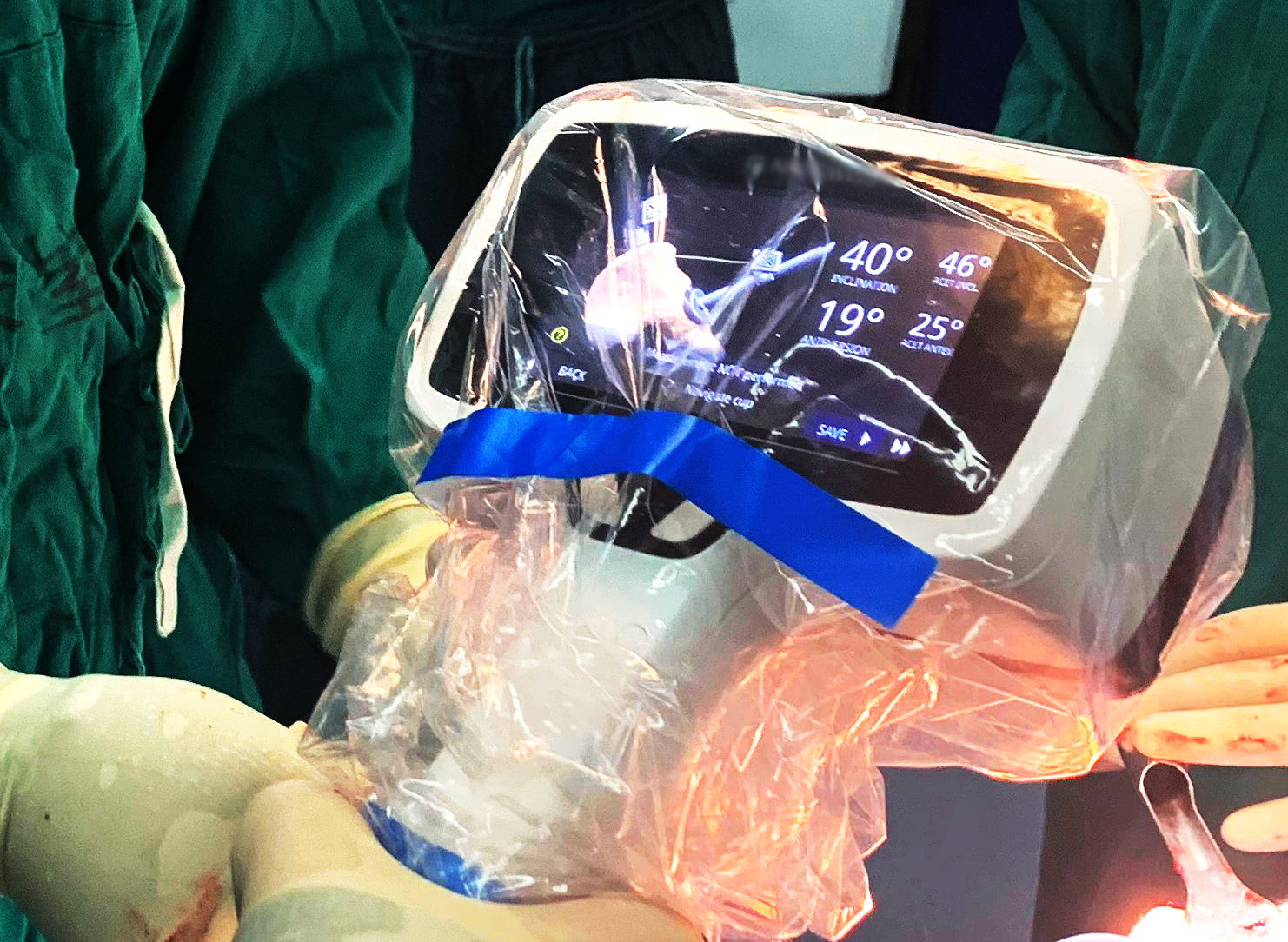
图5. 手持导航系统的术中定位和假体示踪,实时显示假体安放的角度
 科室新闻
科室新闻